Welcome!
I'm Thomas Probst, a computer vision researcher based in Zurich, Switzerland.
About
I am a Computer Vision Researcher at Magic Leap.
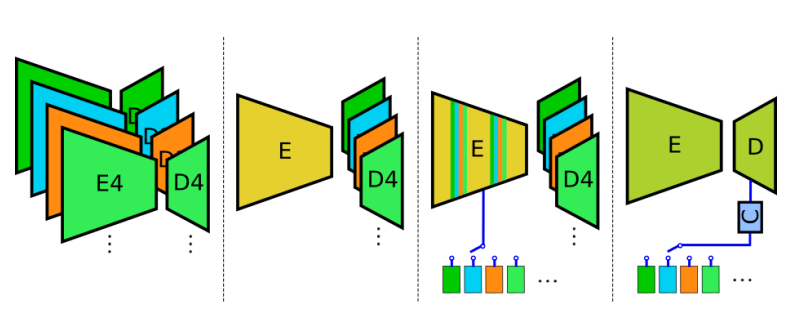
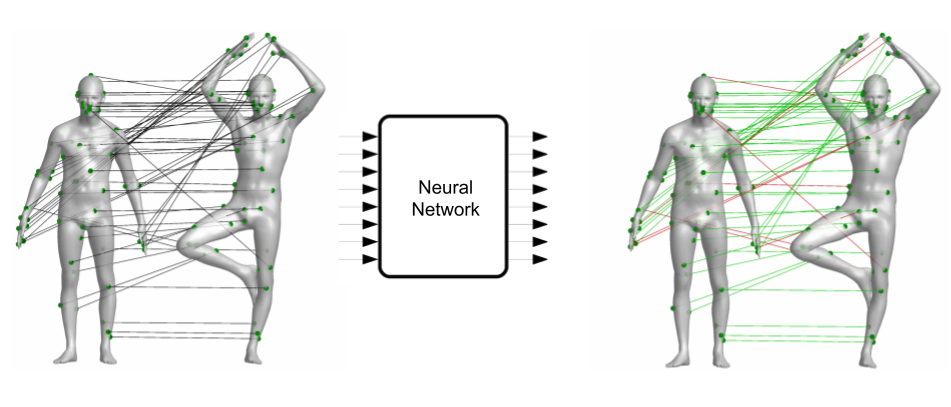
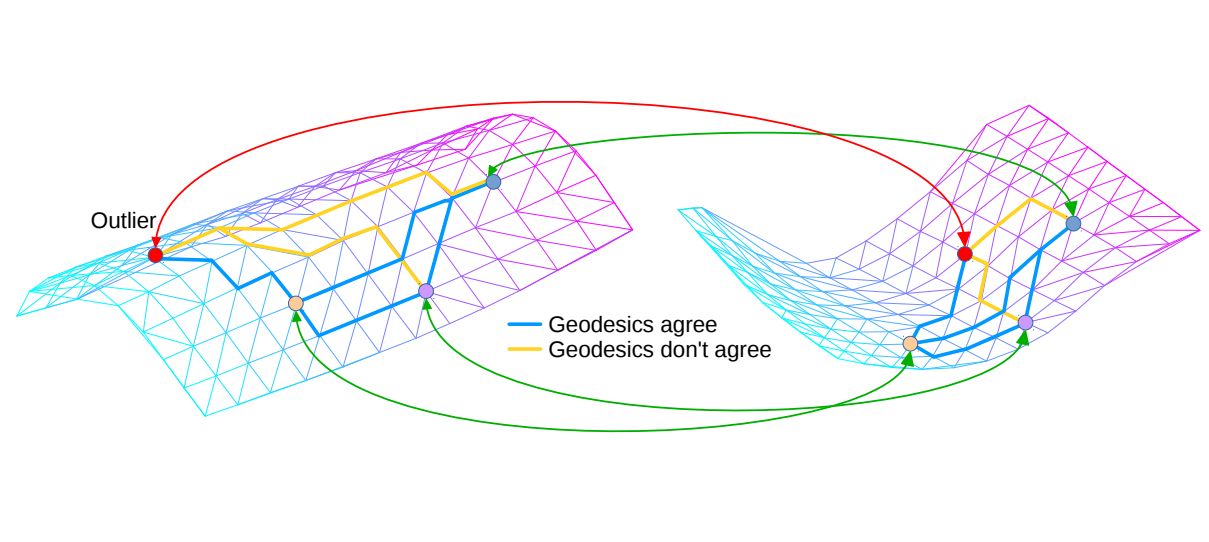
Previously, I was leading the computer vision research at Specta.ai, a digital healthcare startup. I did my PhD and worked as a Postdoc at the Computer Vision Lab under Prof. Luc van Gool at ETH Zürich (Switzerland). The main focus of my research is on deep learning for geometry problems, and the perception of humans for robotics.
I was working on the EurEyeCase project on robot-assisted eye surgery. I have been involved in the EU research project ReMeDi, aiming to develop a system for tele-operated medical diagnostics.
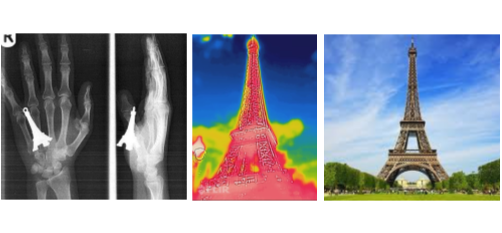
Before that, I worked on multi-modal image registration under the supervision of Christian Wojek and Heiko Neumann at Carl Zeiss Corporate Research and Technology in Oberkochen (Germany) for my masters thesis.
During my course of studies I engaged in thermal spray coating research and estimation of gas flow velocities at Daimler Research and Development in Ulm (Germany).
I took both my undergraduate and master studies in electrical engineering and computer science at Ulm University.
Selected Publications